
Work Experience
Autonomous Driving Perception Algorithm Engineer
BYD Auto Industry Co., Ltd. - Shenzhen, China
Jul.2021-Aug.2023
Algorithm Development
Vision based Semantic 3D occupancy prediction
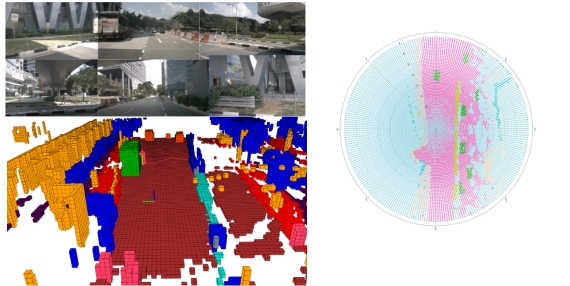
Conducted research on vision based semantic 3D occupancy prediction, proposed a new approach based on BEVFormer used cylindrical coordinate system, added dice loss to get more accurate occupancy.
Here is the PPT for the project.
Multi-Sensor Fusion

Developed the state estimation based on linear Kalman filter of multi-sensor fusion algorithm in ADAS (Advanced Driver Assistance System), mass-produced on BYD Han’s cars.
In the Advanced Driver Assistance Systems (ADAS) environment perception, cameras and millimeter-wave radars are widely used in mass-produced vehicles due to their low costs. This project adopts a fusion strategy that combines one radar with one camera, integrating the unique advantages of each sensor. The final output is a better target tracking than a single sensor.
Specifically, the system processes target information from the front camera and millimeter-wave radar, applying data association, Kalman filtering, and track management techniques to fuse the data into coherent target trajectories
A detailed description of the Kalman filter wrote by me can be found here: Autonomous driving perception fusion - Formula derivation based on Kalman filtering
Parking Slot Detection
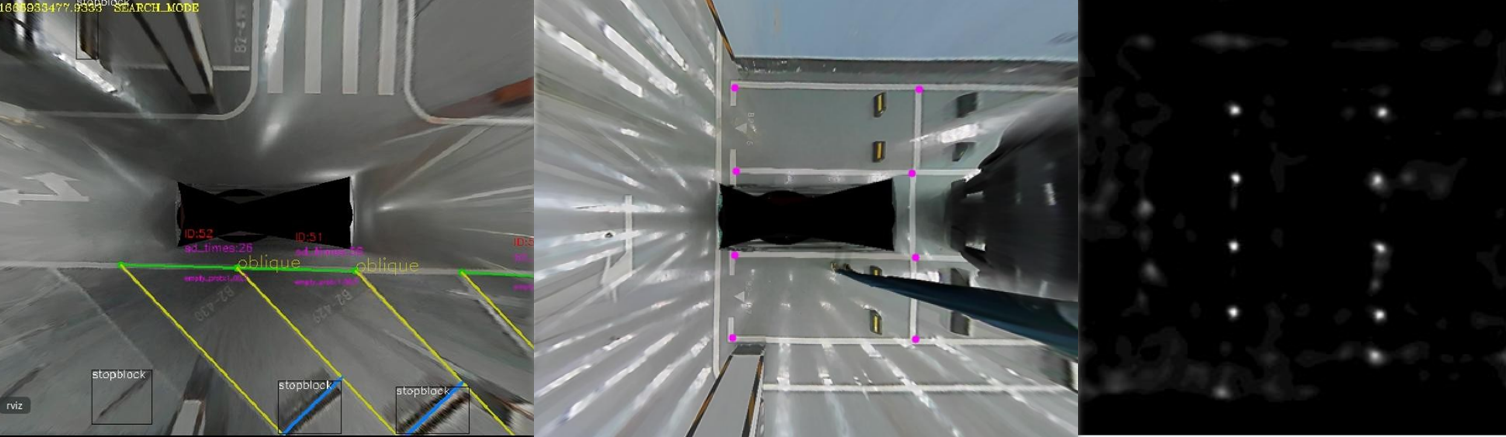
Developed the parking space detection algorithm in APA (Auto Parking Assist) system, introduced Associative Embedding and increased the slot recall rate by 8%.
In practical parking slot detection tasks, a parking slot is composed of two front corner points and a parking line. Therefore, adjacent parking slots must share a same corner point. Associative Embedding is a technique for object detection and pose estimation tasks, which associates semantically related keypoints by assigning them a unique tag. The main advantage is the ability to handle multiple instances of objects with overlapping keypoints. So this method was chosen to better combine the predicted corner points into parking slots.
Project Management
Data Closed Loop
Coordinated and streamlined the entire process of autonomous driving data collection, annotation, and validation of annotation results.
Data Annotation
Led a collaboration with data annotation services providers, managing transaction over ¥2 million. Responsibilities included researching and selecting partners, and authoring data annotation standards adopted by BYD.
Requirement Alignment
Responsible for communicating and coordinating with upstream and downstream departments on technical requirements.